[Media Invitation] Invitation to Tour a Construction Site Employing Robots
2018.11.29
Press release
PDF ver.

For Media Members
Shimizu Corporation is employing the Shimz Smart Site, next-generation production system, for construction at the job site for the karaksa hotel grande Shin-Osaka Tower, a high-rise hotel being built in Shin-Osaka. Multiple robots are being used to handle part of the work in collaboration with workers. Three types of robots have been introduced at the site: Robo-Carrier, a conveyor robot that transports materials horizontally; Robo-Welder, a welding robot for steel columns; and Robo-Buddy, a multipurpose robot for installing interior materials. Exter, a new type of crane, is also working beneath the all-weather cover that covers the top of the job site.
We have planned the following site tour to give members of the media an opportunity to gather information on a job site that incorporates production system innovations. We hope that you can take time out of your busy schedule to join the tour.
<Details>
Date/time: Monday, December 10, 2018
<TV channels> 10:00 a.m. to 12:00 p.m.
<Newspapers/Magazines> 2:00 to 4:00 p.m.
Location: Job site: 3-3-23 Miyahara, Yodogawa-ku, Osaka
Meeting place: 2F, Amitie Shin-Osaka
1-5-46 Nishimiyahara, Yodogawa-ku, Osaka
Schedule: Overview: 20 minutes
Site tour: 80 minutes
Q&A: 20 minutes
Notes:
・ Space is limited to 25 people per tour, so please understand that participants will be accepted on a first-come first-served basis.
・ If you wish to participate, please enter the information into the application and return it by Fax (+81-3-3561-8527) or e-mail (m.noguchi@shimz.co.jp) by Wednesday, December 5.
<Contact for inquiries>
Corporate Communications Dept., Shimizu Corporation Representatives:
Noguchi, Imamura /TEL: +81-3-3561-1186
Application for Tour of Job Site Employing Shimz Smart Site
Monday, December 10 (FAX: +81-3-3561-8527)
Company name:
Participant’s name: (___ additional participants)
TEL:
Cell phone:
E-mail:
<For Reference>
■Overview of Construction Robots Employed at Job Site
・Robo-Carrier
Robo-Carrier is an automatic conveyor system that carries materials delivered to the job site to the location where the work is performed. It detects its own position via laser sensors and referencing BIM data, and automatically carries materials to the specified work site. It will automatically search for a new route and correct its course if it encounters an obstacle. The Robo-Carrier stationed on the first floor picks up palletized materials and loads them onto the Autonomous ELV (elevator) it is linked to, which carries the materials up to the floor where the work is being performed. Another Robo-Carrier then unloads the pallets from the ELV and carries them to the temporary storage site.
・Robo-Welder
Robo-Welder performs fully automatic welding without human intervention. The robot uses laser measurements to recognize the groove depression to weld. The torch on the tip of the robot arm, which can move freely along six axes, determines the conditions for accurately depositing the solder in the depression in real time. At this job site, we are using two types of robots: A pivot-type model equipped with two opposing robots that perform the welding and a ring-type model equipped with one robotic arm that is installed beneath a rail that runs around the outer circumference of the steel column and performs all welding.
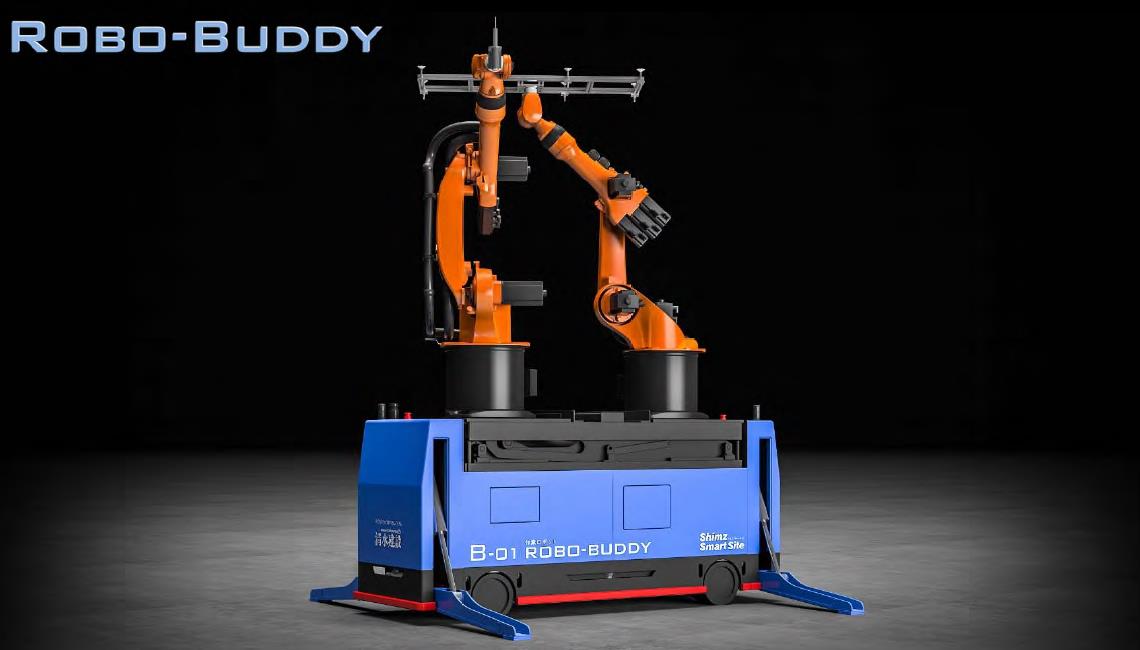
・Robo-Buddy
Robo-Buddy recognizes its own position via laser sensors and referencing BIM information (SLAM function), and automatically moves to the specified work location. It is also equipped with a special feature that enables it to climb over level differences of 20 cm. The two robot arms that perform the work move freely along six axes and can pick up materials weighing up to 30 kg. It operates on an elevating pedestal on top of an automatic guided vehicle. After it recognizes the location to perform the work via imaging sensors and laser sensors, it uses its two robotic arms to insert ceiling suspension bolts, assemble the base materials, and install the ceiling board, screw it into place, and install the OA floor pedestal and paneling. This robot can be used to perform multiple functions by switching the end effectors at the tip of the robotic arms.